Développeur>Tutoriels>Utiliser l’accéléromètre
Dans ce tutoriel vous allez apprendre à gérer l’accéléromètre du robot MRPi1.
L’accéléromètre du robot
Le robot MRPi1 est équipé d’un accéléromètre 3 axes de référence MMA8652FC de chez NXP.
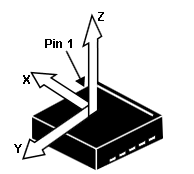
Cet accéléromètre permet de mesurer l’accélération linéaire exprimé en g (environ 9,81 m/s2) .
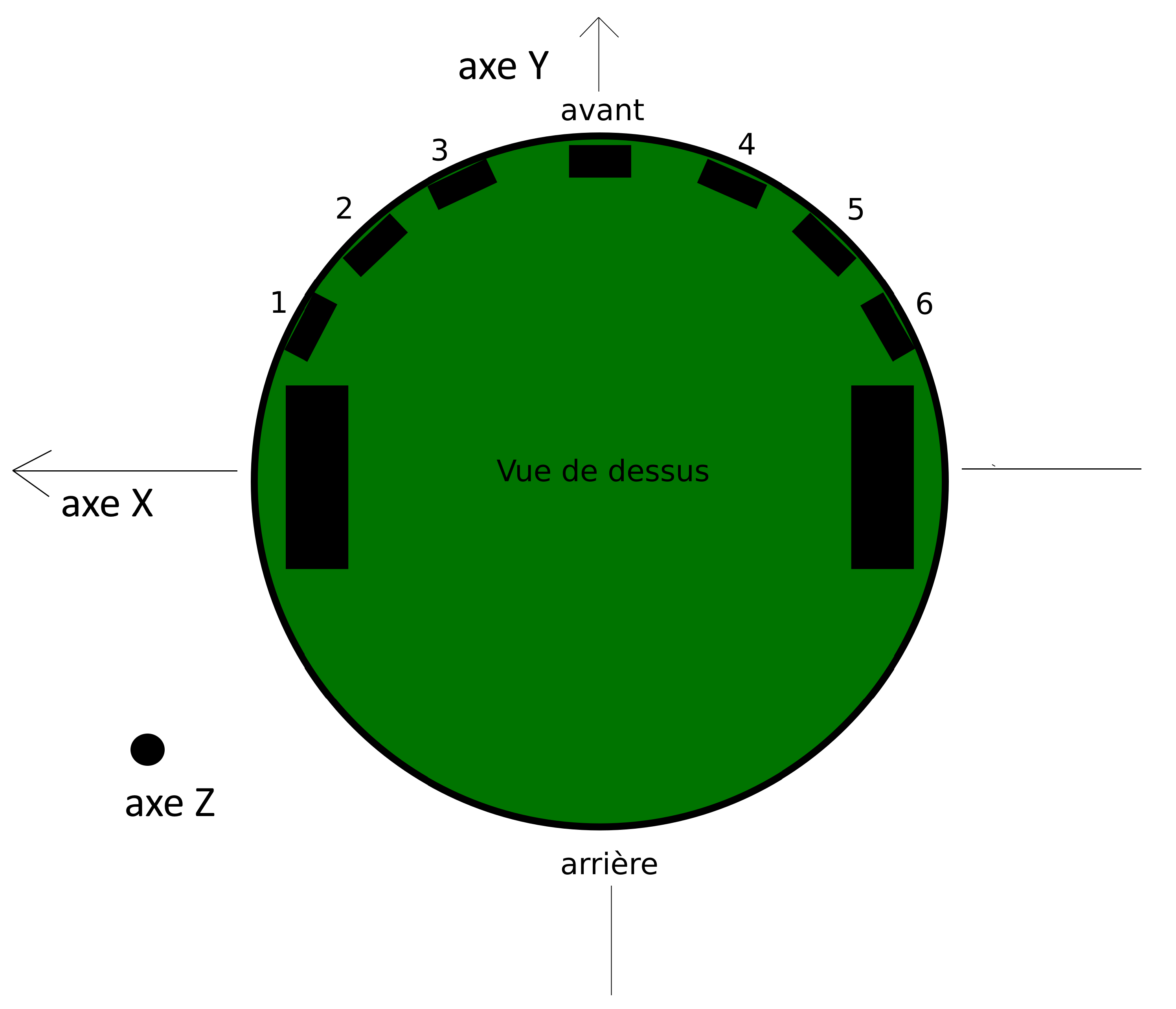
- axe X : coté du robot
- axe Y : avant et arrière du robot
- axe Z : haut et bas du robot
Les valeurs de sorties au repos :
- X out = 0 g
- Y out = 0 g
- Z out = -1 g
Lecture des axes
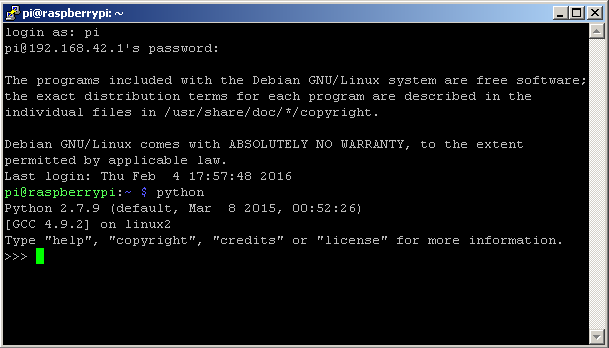
Je considère que vous êtes connecté au robot MRPi1 via le logiciel Putty par exemple (voir le guide de démarrage)
- Lancer l’interpréteur python :
$ python
-
importer la libraire mrpi1_lib :
>>> from mrpi1_lib import *
- lire l’axe X :
>>> acceleroX()
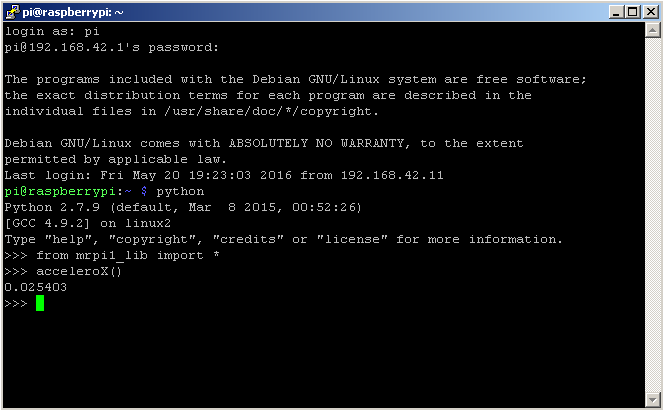
Exemple sans accélération.
La valeur retourné est une valeur en g (accélération).
Deuxième exemple avec une accélération sur l’axe X :
Les fonctions pour lire les 3 axes sont :
- acceleroX() : pour lire l’accélération sur l’axe X.
- acceleroY() : pour lire l’accélération sur l’axe Y.
- acceleroZ() : pour lire l’accélération sur l’axe Z.
Détection de chocs
Un exemple de détection des chocs sur le robot MRPi1 :
from mrpi1_lib import * import time while 1: // Lecture du capteur axeX = acceleroX(); axeY = acceleroY(); axeZ = acceleroZ(); time.sleep(0.01) // axe X if(axeX > 0.1): led(1,1) else: led(1,0) // axe Y if(axeY > 0.1): led(2,1) else: led(2,0) // axe Z if(axeZ > 0.1): led(3,1) else: led(3,0)