Partie 2 : Gestion des déplacements du robot
Date mise à jour : 5 decembre 2019
Introduction
Dans ce tutoriel vous allez apprendre à gérer les déplacements du robot MRPiZ avec la prise en compte des encodeurs en quadrature. Les encodeurs des moteurs vont permettre de connaître la vitesse et le déplacement du robot.
- Faire avancer le robot d’une distance n
- Faire reculer le robot d’une distance n
- Tourné à droite et à gauche d’un angle b
Information sur les encodeurs : https://fr.wikipedia.org/wiki/Codeur_rotatif
Déplacement avec contrôle
Cette partie, va vous permettre de réaliser des déplacements avec un contrôle sur la distance et l’orientation du robot.
Exemple :
Vous souhaitez faire avancer le robot de 10 cm puis de tourner de 90° avec précision.
Les différents fonctions (cliquez sur la fonction pour plus d’informations) :
- forward_mm : avancer.
- back_mm() : reculer.
- turnRight_degree() : tourné à droite.
- turnLeft_degree() : tourné à gauche.
Voici un script python de déplacement du robot :
Nom du script : deplacement3.py
#!/usr/bin/python from mrpiZ_lib import * import time # avancer de 100 mm avec vitesse = 10% forward_mm(10, 100) # tourner a droite de 90° (546 = 90°) turnRight_degree(10, 90) # fin exit()
Exécuter le programme, le robot doit :
- Début du programme
- Avancer de 10 cm
- Puis tourner à droite de 90°
- Fin du programme
La fonction forward_mm:
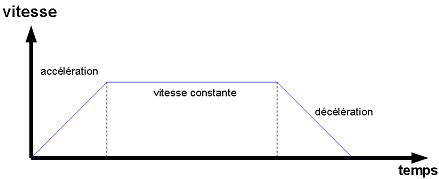
forward_mm(10,100)
Cette fonction permet de faire avancer MRPiZ de 10 cm avec une vitesse de 10%. La vitesse du robot doit suivre une vitesse de type trapézoïdal :
Essayer de modifier la vitesse :
forward_mm(30, 100)
Et la vous obtenez une erreur !

Pourquoi ?
Parce que la vitesse est trop rapide par rapport à la distance à effectuer. Il faut diminuer la vitesse ou augmenter la distance.
Exemple:
forward_mm(30, 500)
Tourner
Voici un autre script python de déplacement du robot :
Nom du script : deplacement4.py
#!/usr/bin/python from mrpiZ_lib import * import time # tourner a droite turnRight_degree(10, 180) # tourner a gauche turnLeft_degree(10, 90) # fin exit()
Ce script permet de :
- tourné à droite de 180°
- tourné à gauche de 90°
Voilà, fin de ce tutorial.