Développeur>Tutoriels>Les capteurs de sol
Dans ce tutorial vous allez apprendre à utiliser les capteurs de sol du robot MRPi1.
Les capteurs de sol
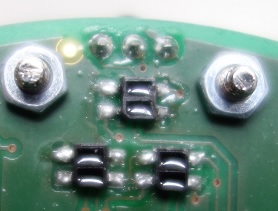
Le robot MRPi1 est équipé de trois capteurs de sol, ils sont situés à l’avant.
- capteur n1° : coté gauche,
- capteur n°2 : milieu,
- capteur n°3 : coté droit,
Lire un capteur
- Lancez l’interpréteur python :
$ python
- importez la libraire mrpi1_lib :
>>> from mrpi1_lib import *
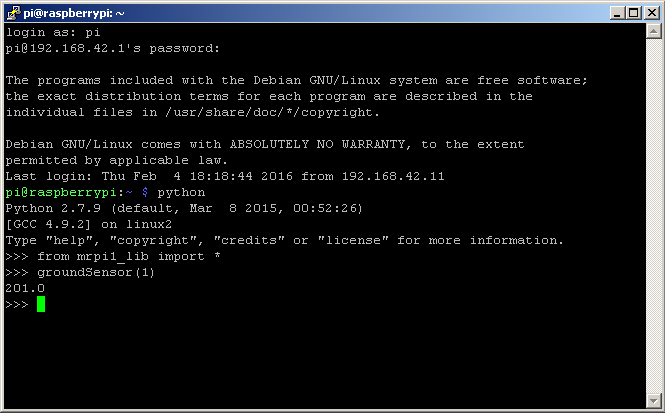
- lire le premier capteur :
>>> groundSensor(1)
La valeur retourné est une valeur entière comprise entre 0 et 4095.
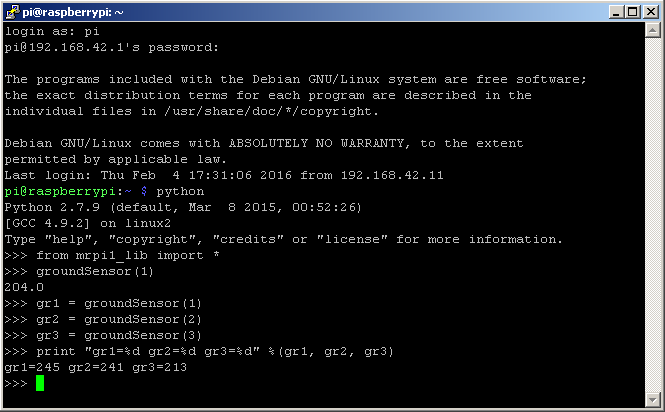
- lire les trois capteurs :
>>> gr1 = groundSensor(1)
>>> gr2 = groundSensor(2)
>>> gr3 = groundSensor(3)
>>> print "gr1=%d gr2=%d gr3=%d" %(gr1, gr2, gr3)