Développeur>Tutoriels>Le récepteur infrarouge (TV)
Dans ce tutorial vous allez apprendre à utiliser le récepteur infrarouge du robot MRPi1. Ainsi, vous pourrez envoyer des commandes au robot viaune télécommande de télévision compatible RC5.
Le récepteur infrarouge
Le robot MRPi1 est équipé d’un récepteur infrarouge situé à l’avant.
 Capteur TSOP2138 (38 Khz)
Capteur TSOP2138 (38 Khz)
Lire le capteur
- Lancez l’interpréteur python :
$ python
- importez la libraire mrpi1_lib :
>>> from mrpi1_lib import *
- lire le capteur :
>>> irReceiver()
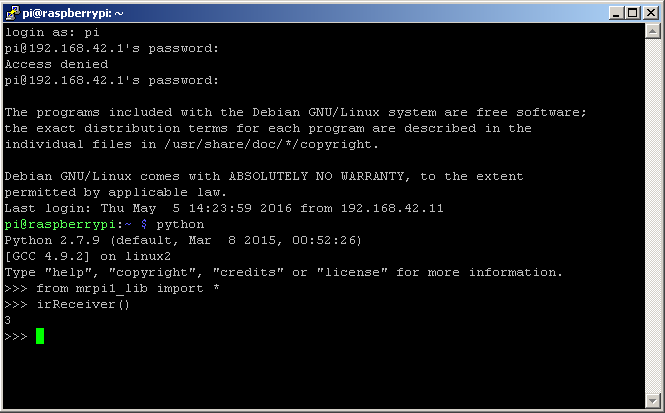
- La valeur reçu correspond à la touche pressé par la télécommande.
Exemple
Exemple de programme avec l’utilisation du récepteur infrarouge :
from mrpi1_lib import *
import time
ir = 0;
state = 0
# activer le control
controlEnable()
while 1:
# lecture du recepteur
ir = irReceiver()
print ir
time.sleep(0.2)
if(ir == 1) and (state == 0):
forwardC(10,400)
state = 1
if(ir == 2) and (state == 0):
forwardC(10,800)
state = 2
if(ir == 3) and (state == 0):
forwardC(10,1600)
state = 3
if(ir == 3) and (state == 1):
forwardC(10,1200)
state = 3
if(ir == 3) and (state == 2):
forwardC(10,800)
state = 3
if(ir == 2) and (state == 1):
forwardC(10,400)
state = 2
if(ir == 1) and (state == 2):
backC(10,400)
state = 1
if(ir == 1) and (state == 3):
backC(10,1200)
state = 1
if(ir == 2) and (state == 3):
backC(10,800)
state = 2
if(ir == 0) and (state == 3):
backC(10,1600)
state = 0
if(ir == 0) and (state == 2):
backC(10,800)
state = 0
if(ir == 0) and (state == 1):
backC(10,400)
state = 0