Développeur>Tutoriels>Gestion des déplacements du robot Mrduino.
Dans ce tutoriel vous allez apprendre à gérer les déplacements du robot Mrduino.
- Faire avancer le robot
- Reculer
- Tourner à droite et à gauche
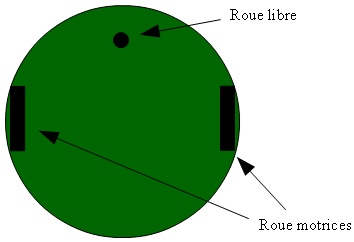
La base roulante
Le robot MRduino est un robot à entraînement différentielle équipée de deux roues motrices de chaque côté et d’une roue libre pour l’équilibre. Ces deux roues motrices sont complètement indépendantes.
Marche avant
Pour pouvoir déplacer le robot en marche avant, il faut tourner les deux roues motrices à la même vitesse en avant.
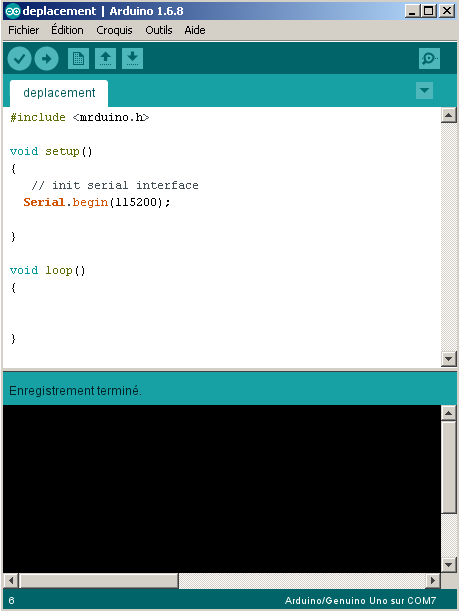
- Importez la librairie mrduino.h (disponible sur Github)

- Initialisation de la liaison série à 115200 baud :
- Faire avancer le robot :
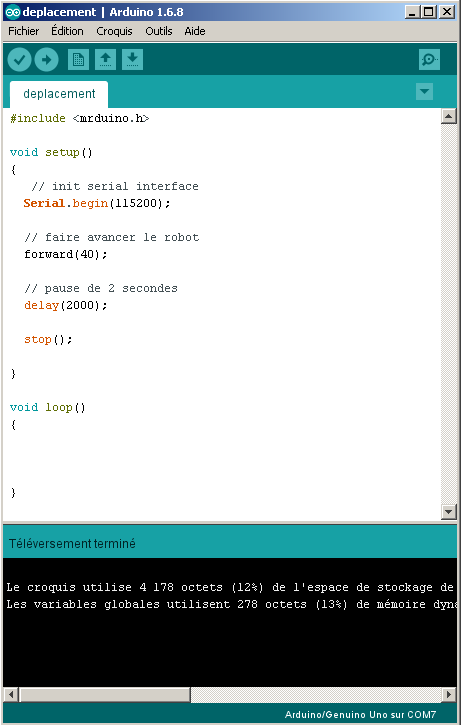
La fonction pour faire avancer le robot :
forward(40);
Cette fonction permet de faire avancer le robot avec une vitesse de 40 %. La vitesse est une valeur comprise entre 0 et 100 %. La vitesse maximale est de 100 %.
Pause de 2 secondes :
delay(2000);
La fonction delay() permet de réaliser un delay de 2000 ms, soit 2 secondes.
- Arrêter le robot :
stop()
Ce premier programme permet de faire avancer le robot pendant 2 secondes.
Marche avant & arrière
Ce deuxième programme permet de faire avancer et reculer le robot MRduino.
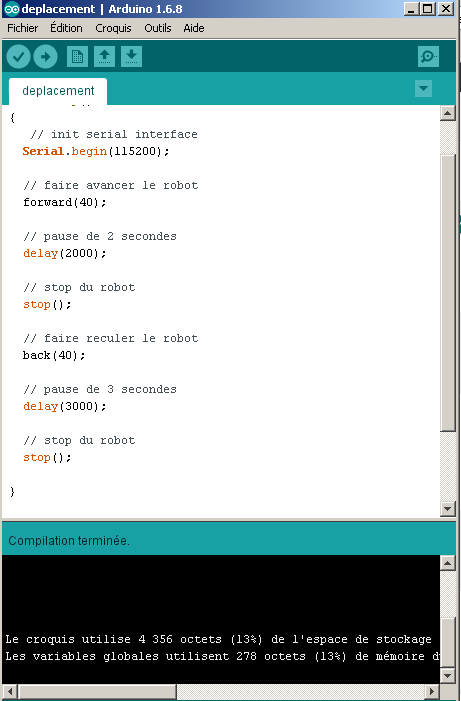
- La fonction back() permet de faire reculer le robot :
back(40);
Tourner
Voici un exemple pour faire tourner à droite et à gauche :
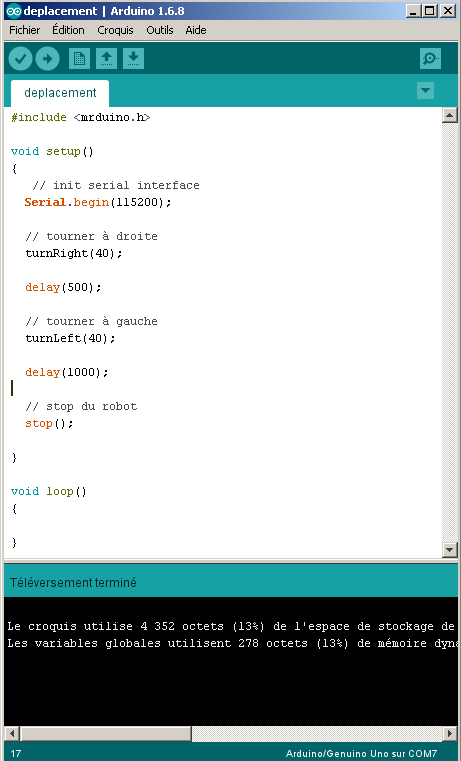
La fonction turnRight() permet de faire tourner le robot à droite.
turnRight(40);
La fonction turnLeft() permet de faire tourner le robot à gauche.
turnLeft(40);
Voila, un premier tutoriel pour la gestion des déplacements du robot MRduino.