Développeur>Tutoriels>Gestion des déplacements du robot MRPi1
Dans ce tutoriel vous allez apprendre à gérer les déplacements du robot MRPi1.
- Faire avancer le robot
- Reculer
- Tourner à droite et à gauche
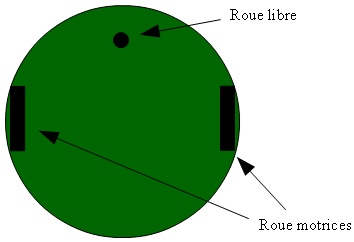
La base roulante
Le robot MRPi1 est un robot à entraînement différentielle équipée de deux roues motrices de chaque côté et d’une roue libre pour l’équilibre. Ces deux roues motrices sont complètement indépendantes.
Marche avant
Pour pouvoir déplacer le robot en marche avant, il faut faire tourner les deux roues motrices à la même vitesse en avant.
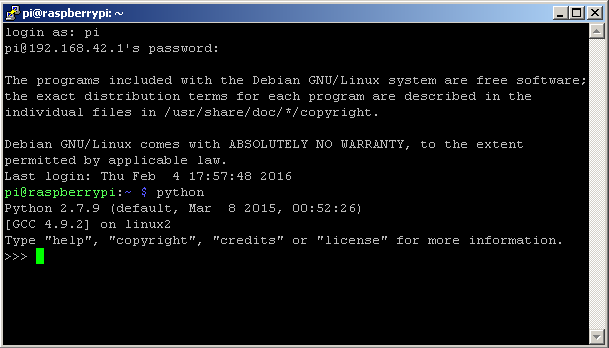
- Lancez l’interpréteur python :
$ python
-
Importez la libraire mrpi1_lib :
>>> from mrpi1_lib import *
- Faire avancez le robot :
>>> forward(40)
Cette fonction permet de faire avancer le robot avec une vitesse de 40. La vitesse est une valeur comprise entre 0 et 100 %. La vitesse maximale est de 100 %.
- Arrêtez le robot :
>>> stop()
Marche avant & arrière
- Ensuite, quittez l’interpréteur python afin de créer un script :
>>> exit()
La commande exit() permet de quitter l’interpréteur python.
- Vous pouvez crée un script python avec l’éditeur de votre choix, pour ma part j’utilise Notepad++ et ensuite je transfert le fichier sur la Raspberry pi via le logiciel FileZilla.
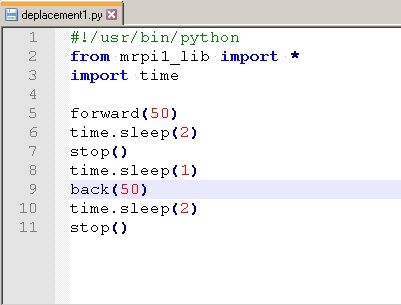
- Voici un petit script python de déplacement du robot :
Nom du script : deplacement1.py
#!/usr/bin/python from mrpi1_lib import * import time // avancer le robot avec une vitesse de 50 % forward(50) // pause de 2 secondes time.sleep(2) // arrêt du robot stop() // pause de 1 seconde time.sleep(1) // marche arrière back(50) // pause de 2 secondes time.sleep(2) // arrêt du robot stop() // Fin du programme
- Le script deplacement1.py terminé, vous devez le rendre exécutable, avec la commande :
$ chmod +x deplacement1.py
- Exécutez le programme :
$ ./deplacement1.py
Le robot doit :
- Début du programme
- Avancer pendant 2 secondes,
- S’arrêter pendant 1 seconde,
- Reculer pendant 2 secondes,
- Puis s’arrêter
- Fin du programme
Le module time :
# module time pour utiliser la fonction sleep
import time
Tourner
Nous allons gérer les fonctions permettant de faire tourner le robot à droite et à gauche.
- Voici un script python de déplacement du robot :
Nom du script : deplacement2.py
#!/usr/bin/python from mrpi1_lib import * import time turnRight(30) time.sleep(2) stop() time.sleep(0.5) turnLeft(20) time.sleep(1) stop()
- Le script deplacement2.py terminé, vous devez le rendre exécutable, avec la commande :
$ chmod +x deplacement2.py
- Exécuter le programme :
$ ./deplacement2.py
Le robot doit :
- Début du programme
- Tourner à droite pendant 2 secondes,
- S’arrêter pendant 0,5 seconde,
- Tourner à gauche pendant 1 seconde,
- Puis s’arrêter
- Fin du programme
Voila, maintenant vous savez gérer les déplacements de base du robot.
La suite de ce tutorial : gestion des déplacements avec asservissement.