Robot quadrupède Open source en cours de réalisation
Mise à jour : 11/10/2019
Abonnez-vous pour rester informé de nos derniers développements :
1. But du projet
Le but de ce projet est la réalisation d’un robot quadrupède de type 2D delta robot. La mécanique 2D delta permet de déporter le poids des servomoteurs sur le corps du quadrupède. Ceci permet aussi de simplifier la mécanique.
Les pattes en mécanique 2D delta on la forme d’un losange.

Troisième prototype
2.Vidéo prototype :
3.Le matériels
- µC : Teensys 3.5 (compatible avec Arduino, 32 bit 120 MHz ARM Cortex-M4)
- Contrôle servomoteur : Driver I2C pour 16 servomoteurs
- IMU : CMPS12
- Servomoteurs : JX PDI-6221MG (20 kg)
- Matériaux : pmma de 3 mm découper avec une machine à découpe laser
4.Cinématique inverse
La cinématique inverse permet de calculer les angles des servomoteurs en fonction de la positon désiré d’une patte.
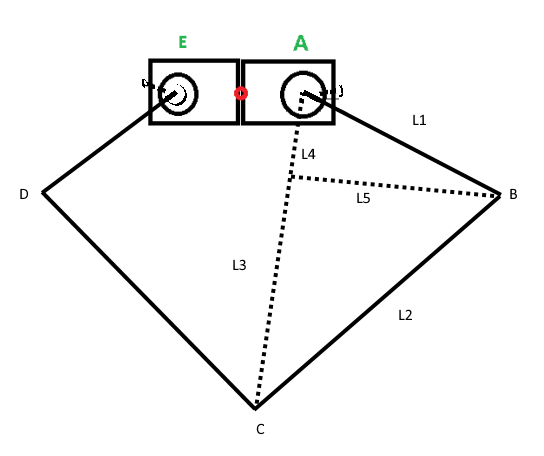
Calcul de l’angle du point A et E en fonction de la position du point C.
5.Les allures
… en cours
Il y a deux type de marche pour les robots quadrupèdes, les allures statique et dynamique.
Marche statique
- 3 pattes au sol à tous instant
- La projection du centre de masse du robot doit rester à l’intérieur du polygone formé par les pattes au sol.
Marche dynamique
… en cours
6.Contrôle de l’équilibre
Le robot quadrupède Borvo devra être capable de déterminer son orientation afin de conserver son équilibre, maintenir le corps parallèle à l’horizon.

Un capteur inertielle (IMU) sera utiliser pour mesurer l’angle de tangage (pitch) et roulis (roll). Un système d’asservissement (PID) sera implanté pour maintenir le corps stable.
7.Les sources mécanique
Les fichiers dxf : ici.
Licence des fichiers CC-BY-SA
Exemples