Mise à jour : 14/12/22
Dans ce tutoral vous allez apprendre à programmer le microcontrôleur STM32F4 du robot mobile MRPiZ.
- Logiciel nécessaire : STM32CubeProgrammer (téléchargeable ici)
- Matériel nécessaire : câble micro-usb
Sous windows
Étape n°1
Le robot doit être éteint.
- Positionner l’interrupteur n°1 sur la position OFF

Cet interrupteur est soudé sous le robot (sur la photo l’interrupteur est en position on)
Étape n°2
Brancher un câble micro-usb, puis allumer le robot. Votre ordinateur doit détecter le microcontrôleur en mode Device Firmware Update.
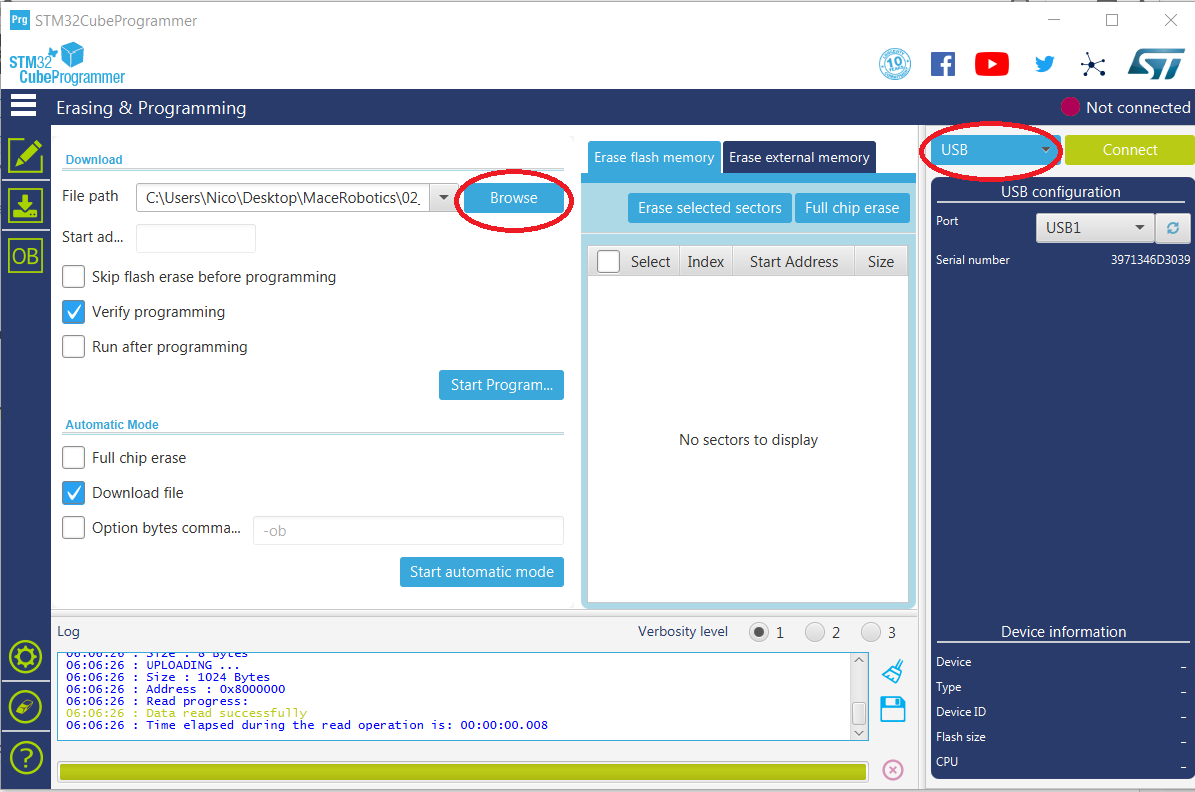
- Choisir une connexion via USB
- Cliquez sur le bouton Connect
- Choisir votre fichier HEX (File Path) générer par votre IDE.
- Détection du microcontrôleur :

- Start Program : programmation du microcontrôleur STM32.
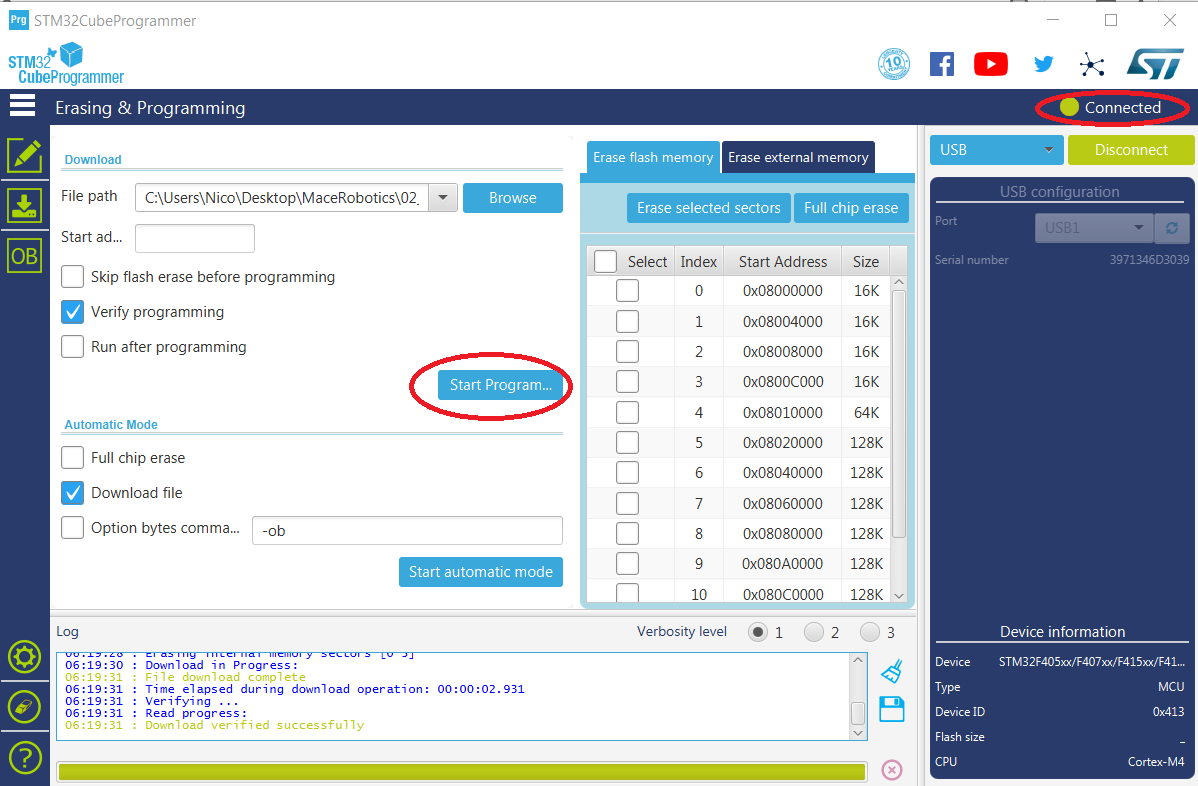
Une fois, le microcontrôleur programmé, vous pouvez éteindre le robot et remettre l’interrupteur en position ON.
Sous linux
- dfu-util -a 0 -s 0x08000000:leave -D MRPiZ.bin : commande pour flasher le binaire d’un firmware binaire.
Fin du tuto !