Le robot MR-25 est équipé de cinq connecteurs afin de recevoir des capteurs de proximité de type :
Le robot MR-25 peut avoir cinq capteurs maximum.
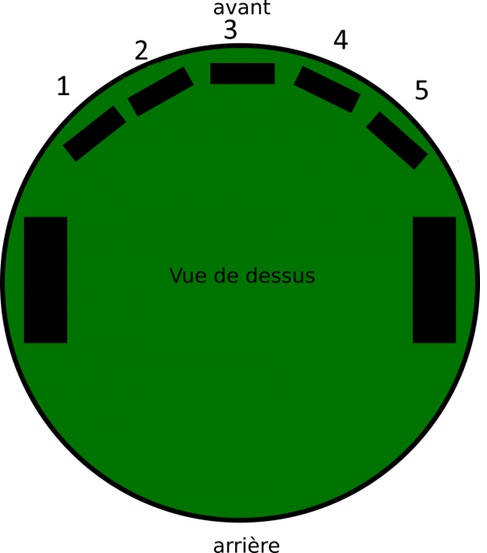
Voici une vue de de dessus du robot et le placement des cinq capteurs à l’avant du robot :
Simple lecture d’un capteur
Lecture du capteur sur l’emplacement n°1 :
Caractéristiques du capteur :
- Sortie en millimètres
- De 0 à 90 mm (dépend de la lumière et de la surface de réflexion)
- De préférence réflexion sur une surface blanche.
- Si la distance est supérieure à 90mm, la sortie = 255
Lecture du capteur sur l’emplacement n°1 et n°3 :
Lecture de tous les capteurs
Un exemple de lecture de tous les capteurs de distances du robot :
Fin !