Développeur>Tutoriels>Contrôler un servomoteur avec MRPi1
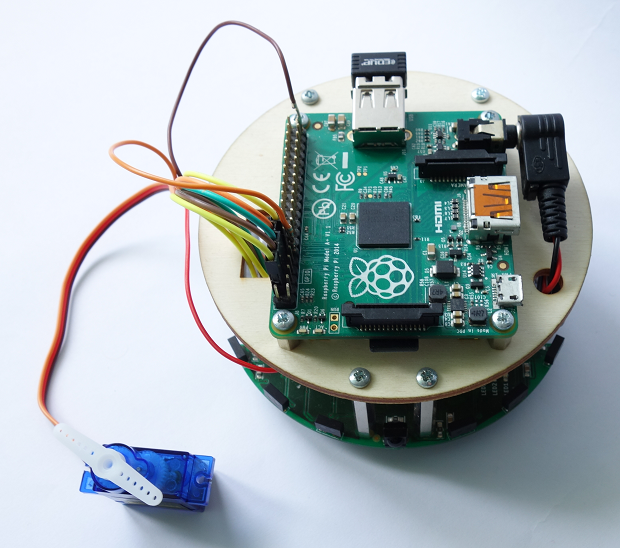
Dans ce tutorial vous allez apprendre à contrôler un servomoteur avec le robot MRPi1.
Besoins :
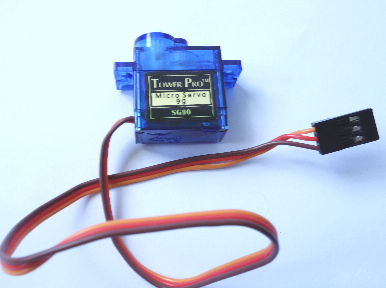
- Un petit servomoteur (type SG90)
Préparation du servomoteur
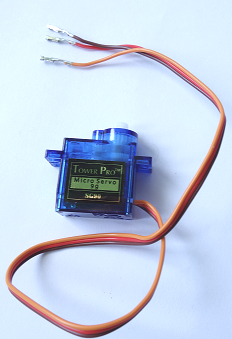
Pour facilité la connexion du servomoteur sur le robot MRPi1, il est nécessaire d’enlever le connecteur.
Avant :
Après :
Le câblage
Un servomoteur est constitué de 3 fils :
- Un fil pour le 0V (marron)
- Un fil pour l’alimentation (rouge)
- Un fil pour la commande (orange)
Connexion sur le robot MRPi1 :
| Servomoteur | |
|---|---|
| Fil 0V (marron) | 0V (exemple pin 39 de la carte Raspberry Pi) |
| Fil 0V (marron) | 0V (exemple pin 39 de la carte Raspberry Pi) |
| Fil de commande (orange) | GPIO17 de la carte Raspberry Pi |
Le programme python
La commande est une valeur comprise entre 100 et 200 ms.
Exemple test_servo.py :
#!/usr/bin/python
import time
import RPi.GPIO as GPIO
from RPIO import PWM
GPIO.setmode(GPIO.BCM)
GPIO.setup(17,GPIO.OUT)// initialisation de la sortie GPIO17
PWM.setup()
PWM.init_channel(0)
valeur = 100
while 1:
print "Command:"
command = raw_input()
PWM.add_channel_pulse(0, 17, 0, int(command) )
time.sleep(1)
Lancement du programme :
$ sudo ./test_servo.py
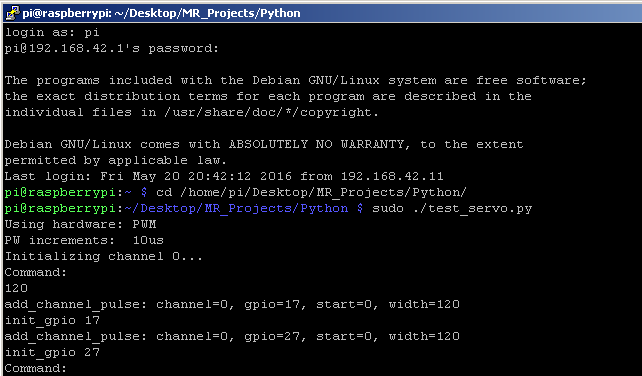
Exemple :