Un tutoriel en langage Arduino pour lire les encodeurs du robot MRduino2. Le robot MRduino2 est équipé de 2 encodeurs magnétiques sur les moteurs de déplacement.
Lecture des encodeurs du robot
#include <mrduino2.h>
int encodDroit, encodGauche;
void setup()
{
initRobot();
}
void loop()
{
forward(25);
encodGauche = encoderLeft();
encodDroit = encoderRight();
Serial.print("Encodeur droit =");
Serial.println(encodDroit);
Serial.print("Encodeur gauche =");
Serial.println(encodGauche);
delay(2000);
}
Pour visualiser les valeurs des encodeurs en temps réel, vous pouvez utiliser le moniteur du logiciel Arduino. Le port micro-usb du haut du robot MRduino2 doit être relié à votre PC.
- Visualisation des valeurs :
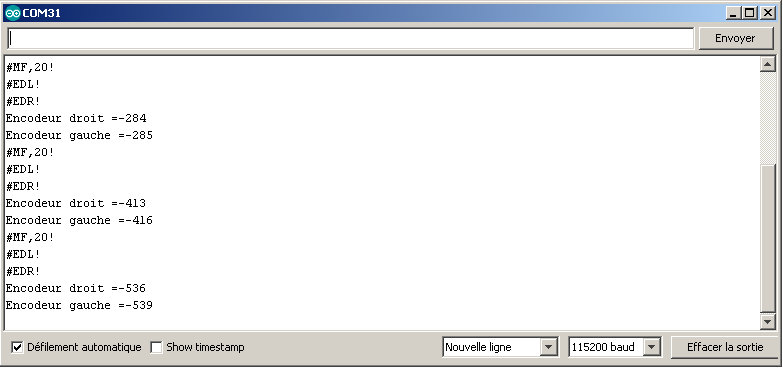
Les commandes commençant par les caractères # ne sont pas à prendre en compte. Ce sont les commandes de communication entre la carte Arduino et la carte de contrôle du robot.
Fin du tuto.