Date mise à jour : 21/03/2018
Dans ce tutoriel vous allez apprendre à contrôler avec un node ROS le robot MRPiZ.
 Prérequis :
Prérequis :
- Os : Ubuntu
- ROS Kinetic doit être installer sur votre PC
- Un robot MRPiZ
1. Création de l’espace de travail
- Créons l’espace de travail catkin workspace ROS :
$ mkdir -p ~/robot_ws/src $ cd ~/robot_ws/src $ catkin_init_workspace
- Construire l’espace de travail avec la commande make:
$ cd ~/robot_ws/ $ catkin_make $ source devel/setup.bash
2. Création de votre package
Création d’un nouveau package pour le robot MRPiZ, placez vous dans le répertoire de travail :
$ cd ~/robot_ws/src
- Puis création d’un nouveau package ‘mrpiz_pack‘ qui dépend de rospy et std_msg :
$ catkin_create_pkg mrpiz_pack std_msgs rospy
Cette commande va créer un dossier mrpiz_pack qui contient un fichier package.xml et un fichier CMakeLists.txt.
- Ensuite, ne pas oublier de « sourcer » votre environnement :
$ cd ~/robot_ws $ source /opt/ros/kinect/setup.bash
- Construction du package avec la commande catkin_make :
$ catkin_make
3. Téléchargement des sources
- Placez-vous dans un répertoire temporaire et clonez le répertoire ROS du robot MRPiZ :
$ git clone https://github.com/macerobotics/mrpiz_driver
Vous obtenez trois répertoires :

- src
- launch
- urdf
- Copier ces 3 répertoires dans le répertoire du package:
$ cd ~/robot_ws/src/mrpiz_pack/
Vous devez obtenir ceci:
Vous devez obtenir un répertoire mrpiz_driver avec des répertoires launch, src et urdf.
Le répertoire src doit contenir les fichiers python.
- Donnez les droits d’exécution aux fichiers python :
$ cd ~/robot_ws/src/mrpiz_pack/src/ $ chmod +x mrpiz_driver.py $ chmod +x mrpizSshDriver.py $ chmod +x mrpiz_teleop_key.py
4. Make node
$ cd ~/robot_ws $ catkin_make
5. Lancement du master
- Ouvrir un nouveau terminal, afin de lancer le master. Le master gère la communication entre les nodes.
$ roscore
Plus d’informations :http://wiki.ros.org/Master
6. Lancement du driver
- Ouvrir un nouveau terminal.
cd ~/robot_ws $ source ./devel/setup.bash
Avant de lancer le node de communication avec le robot MRPiZ, vérifier que le robot est bien connecté à votre PC.
- Lancement du node du driver pour le robot MPRiZ avec la commande rosrun :
$ rosrun mrpiz_pack mrpiz_driver
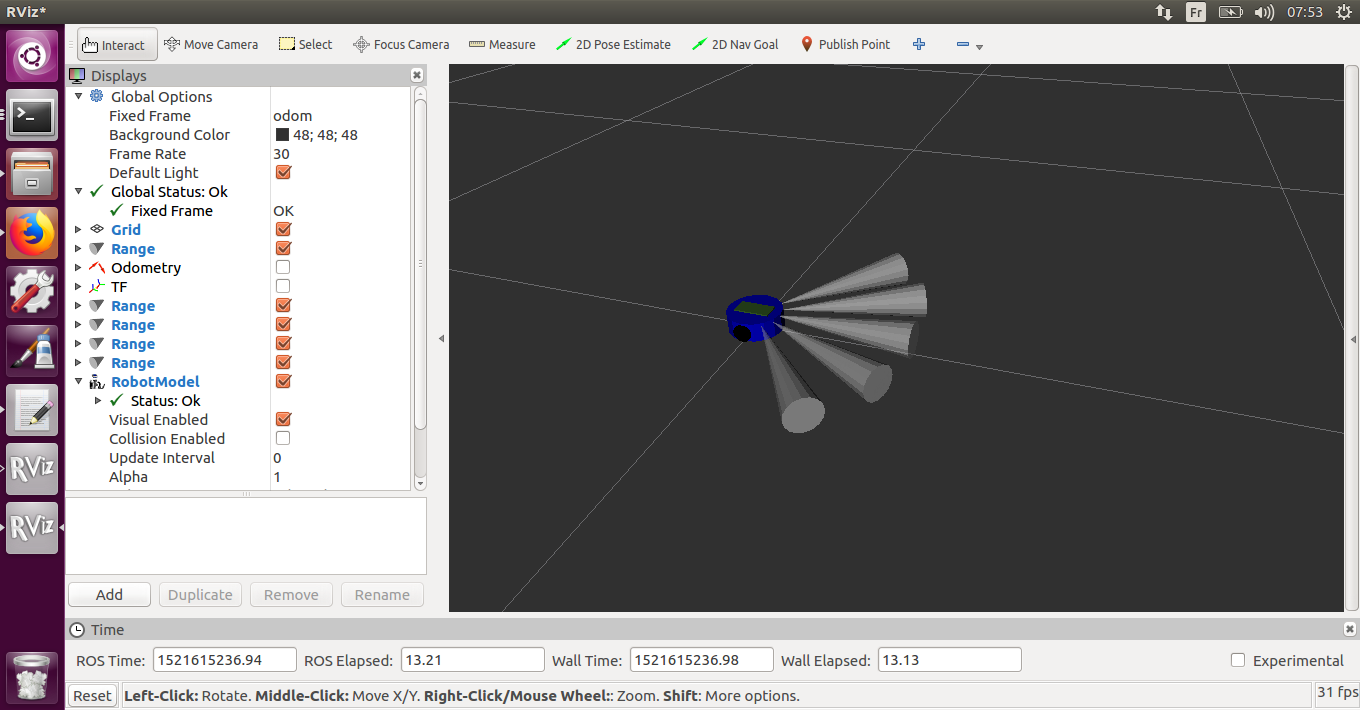
7. Lancement de RViz
RViz est un outil de visualisation 3D de ROS.
- Ouvrir un nouveau terminal et placez-vous dans le workspace :
$ cd ~/robot_ws $ source ./devel/setup.bash
- Lancement du launch:
$ roslaunch mrpiz_pack mrpiz_teleop.launch
Vous devez obtenir l’ouverture de l’outil RViz :
8. Contrôle du robot
- Ouvrir un nouveau terminal afin de lancer le node de controle par le clavier :
$ cd ~/robot_ws $ source ./devel/setup.bash $ rosrun mrpiz_pack mrpiz_teleop_key.py
Les touches de contrôle du robot :
- w : avancer
- s : stop
- a : tourner à droite
- d : tourner à gauche
- x : reculer

Voilà, fin du tutoriel pour le contrôle du robot MRPiZ avec un node ROS.
Fin du tuto !
Source : https://wiki.ros.org/fr
Creative Commons Attribution 3.0