Développeur>Guide de montage
Cette page vous permet de monter la plateforme MRPi1.
1.Outils nécessaire :
- Un tournevis cruciforme
- Une pince coupante
- Un fer à soudé avec de l’étain
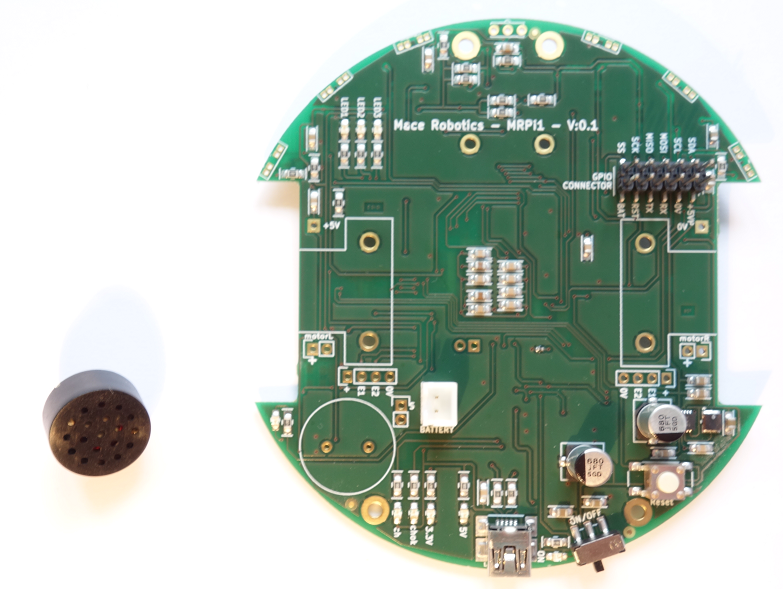
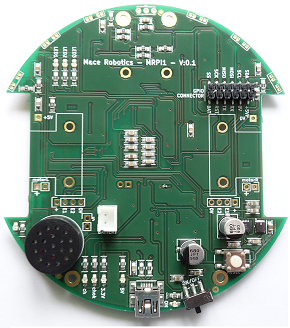
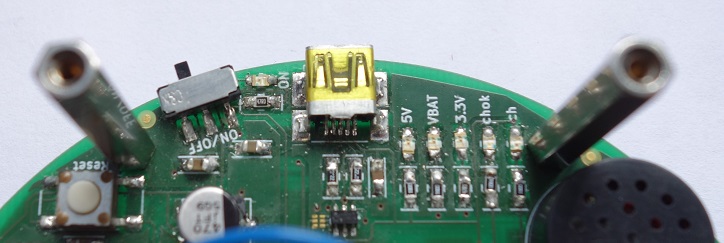
2.Souder le haut parleur
Besoins :
- Le haut parleur
- Fer à soudé + étain
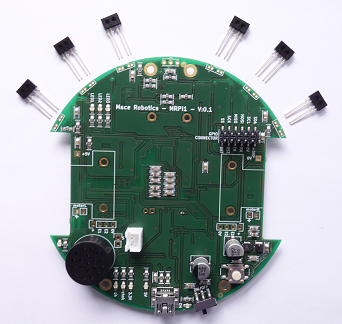
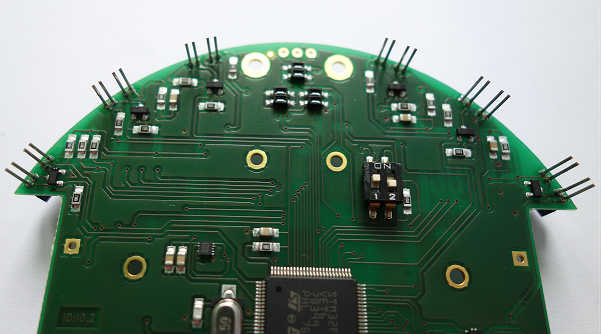
3.Souder les capteurs de proximité
Besoins :
- Les 6 capteurs de proximité
- Fer à soudé + étain
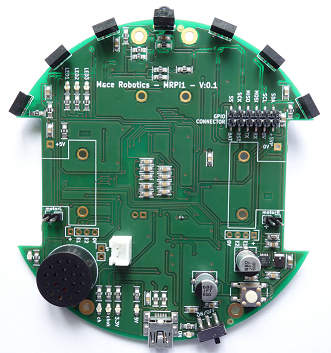
 Capteurs de proximité non soudé
Capteurs de proximité non soudé
- Placez les capteurs de proximité sur la carte, attention aux sens des capteurs !
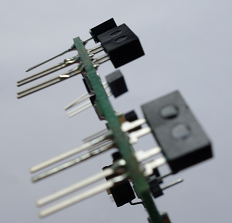
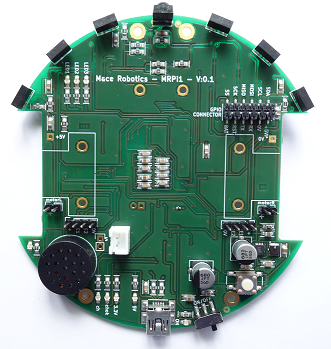
Capteurs de proximité soudé
Après avoir soudé les six capteurs de proximité vous pouvez couper les pattes avec une pince coupante.
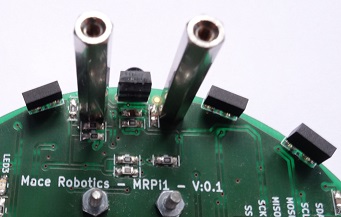
4.Souder le récepteur infrarouge
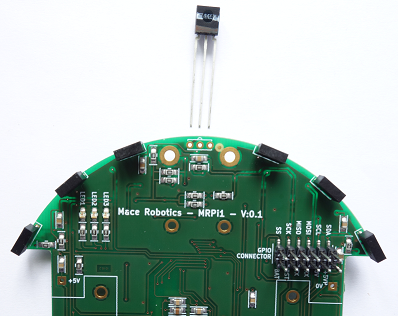 Récepteur infrarouge non soudé
Récepteur infrarouge non soudé
Récepteur infrarouge soudé
Vous pouvez couper les pattes du récepteur infrarouge avec une pince coupante.
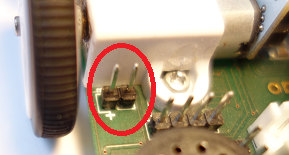
5.Souder les connecteurs moteurs
Les connecteurs des moteurs sont équipés de 2 pins :
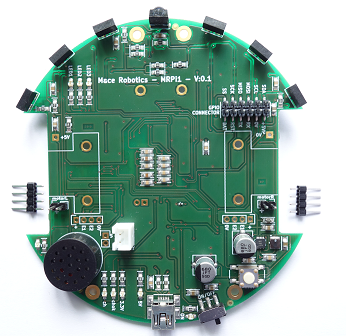
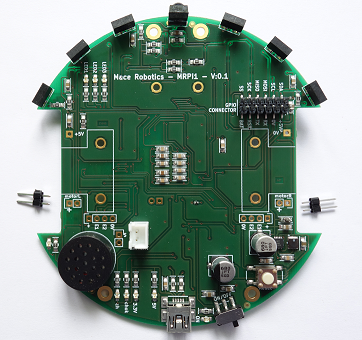 Connecteurs des moteurs non soudé
Connecteurs des moteurs non soudé
 Connecteurs des moteurs soudé
Connecteurs des moteurs soudé
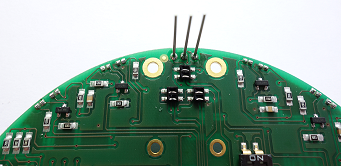
6.Soudé les connecteurs encodeurs
Les connecteurs des encodeurs sont équipés de 4 pins :
 Connecteurs des encodeurs non soudé
Connecteurs des encodeurs non soudé
Connecteurs des encodeurs soudé
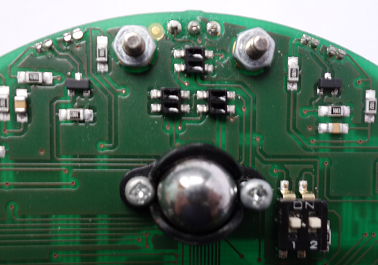
7.Montage de la roue libre et des roues
Besoins :
-
Carte de contrôle du robot MRPi1
- Roue libre avec visserie
-
Monter la roue libre sur la carte de contrôle avec les deux vis :
- Monter les roues sur les moteurs :

8.Montage des moteurs
-
Monter le support sur les moteurs :
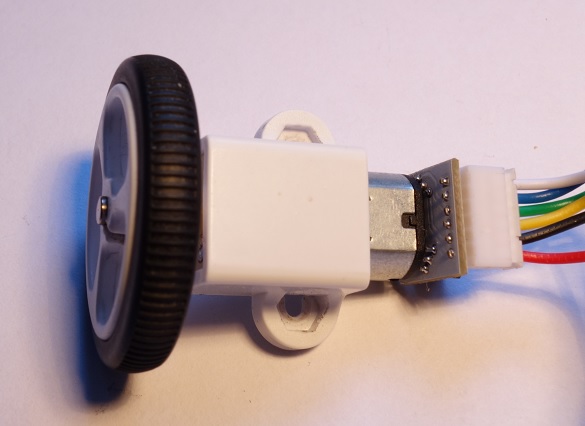
-
Monter les moteurs sur la carte :
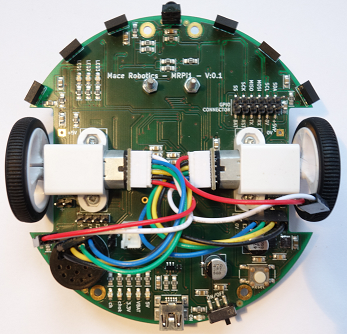
9.Connexion des moteurs
- connecteur avec deux pins mâles
Nom du connecteur moteur droit :
- motorR
Nom du connecteur moteur gauche:
- motorL
- Connexion entre le connecteur femelle et mâle: 2 pins (fil blanc et rouge) :
Fil rouge : pin +
Fil blanc: autre pin
10.Connexion des encodeurs
- Connecteur avec 4 pins mâles

- Connexion entre le connecteur femelle et mâle par 4 pins :
- Fil noir : +
- Fil jaune : E1
- Fil vert : E2
- Fil bleu : 0V
11. Montage des entretoises
Besoins :
-
Carte de contrôle
-
Les 4 entretoises de 30 mm
-
4 écrous

- Fixez les entretoises de 30 mm sur la carte de contrôle :
Entretoise avant
 Entretoise arrière
Entretoise arrière
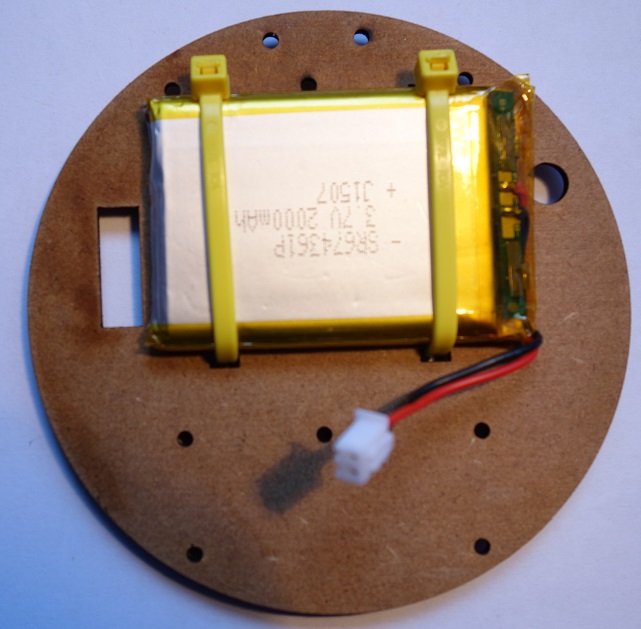
12. Montage de la batterie
Besoins :
-
La batterie
-
Les deux serres câbles
- Support en bois
-
Placez la batterie sur le support bois comme la photo ci-dessous, avec les serres câbles :
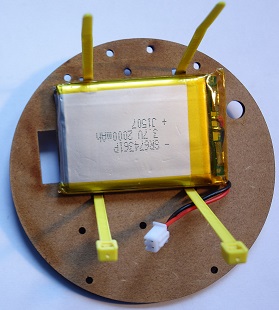
- Fixez et couper les serres câbles :
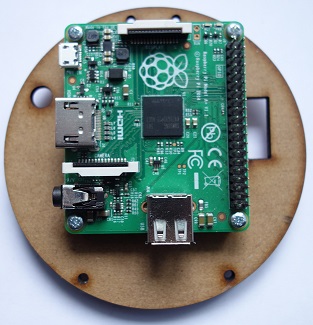
13. Montage de la carte Raspberry Pi
Besoins :
-
Support bois
-
Les 4 entretoises de 5mm + 4 écrous
- Fixez les quatre entretoises :
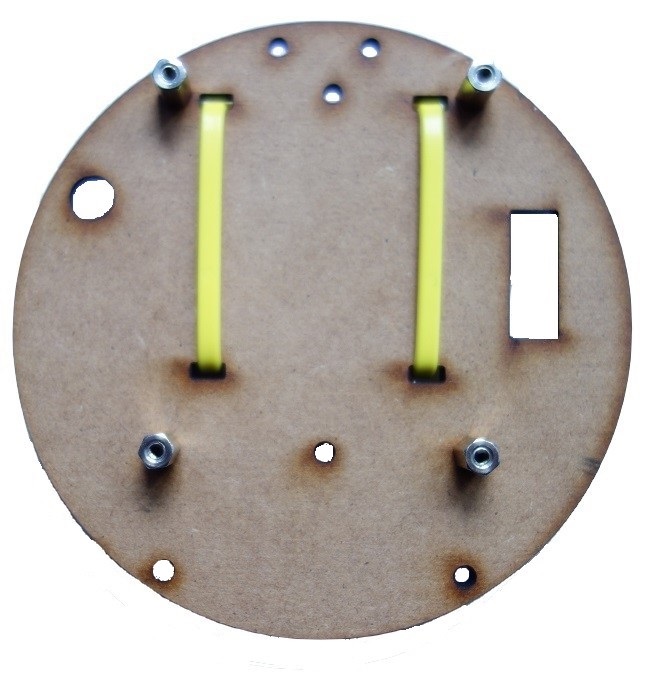
- Fixez la carte Raspberry Pi :
14. Mise en place de la clé Wifi, carte micro-SD et câble audio
Besoins :
-
Câble audio
- micro-SD
-
Clé wifi

15.Connecteur entre la Raspberry Pi et la carte de contrôle
- Mise en place du connecteur entre la carte de contrôle et la carte Raspberry Pi
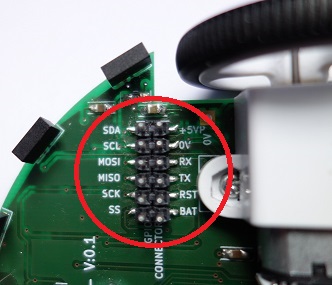
- Connectez les quatre connecteurs sur :
- +5VP (alimentation +5V de la carte Raspberry Pi)
- 0V (référence)
- RX (réception série)
- TX (transmission série)
- RST (Reset)

- Placez le support de la carte Raspberry Pi :
- Connectez le connecteur audio :

Le fil rouge se place sur la pin ‘S’.
- Connectez la batterie :

- Fixez le support de la carte Raspberry Pi :
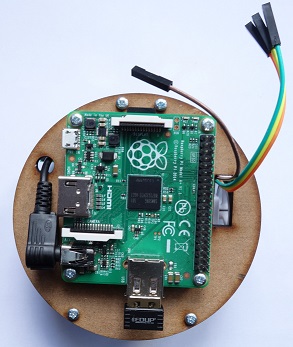
- Connectez les quatre connecteurs :
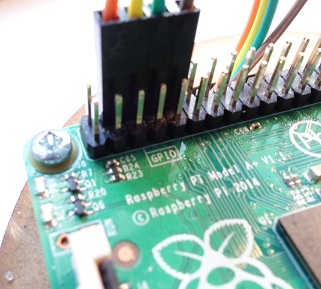
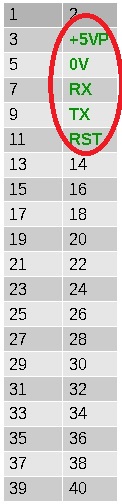
- +5VP: Pin 4
- 0V : Pin 6
- RX : Pin 8
- TX : Pin 10
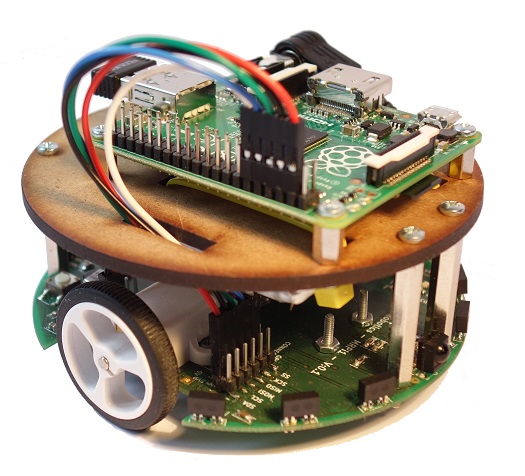
Voilà, votre robot MRPi1 est prêt !
Félicitations !