Développeur>Guide de démarrage du robot MRduino Wireless
![]()
Guide de démarrage du robot MRduino Wireless
Cette page présente les premiers pas avec le robot MRduino Wireless. Veuillez suivre ces étapes dans l’ordre.
Qu’est-ce que vous avez besoin ?
- Le robot MRduino Wireless,
- Le logiciel IDE Arduino : ici.
- Un câble usb de type micro et mini.
Les différentes étapes :
- Recharger la batterie du robot,
- Mise en marche du robot,
- Téléchargement de la librairie,
- Programmer le robot.
2.Recharger la batterie du robot
Pour recharger la batterie du robot MRduino Wireless vous avez besoin :
- un câble mini-USB,
- un PC ou un adaptateur secteur-USB
Ensuite pour recharger la batterie du robot :
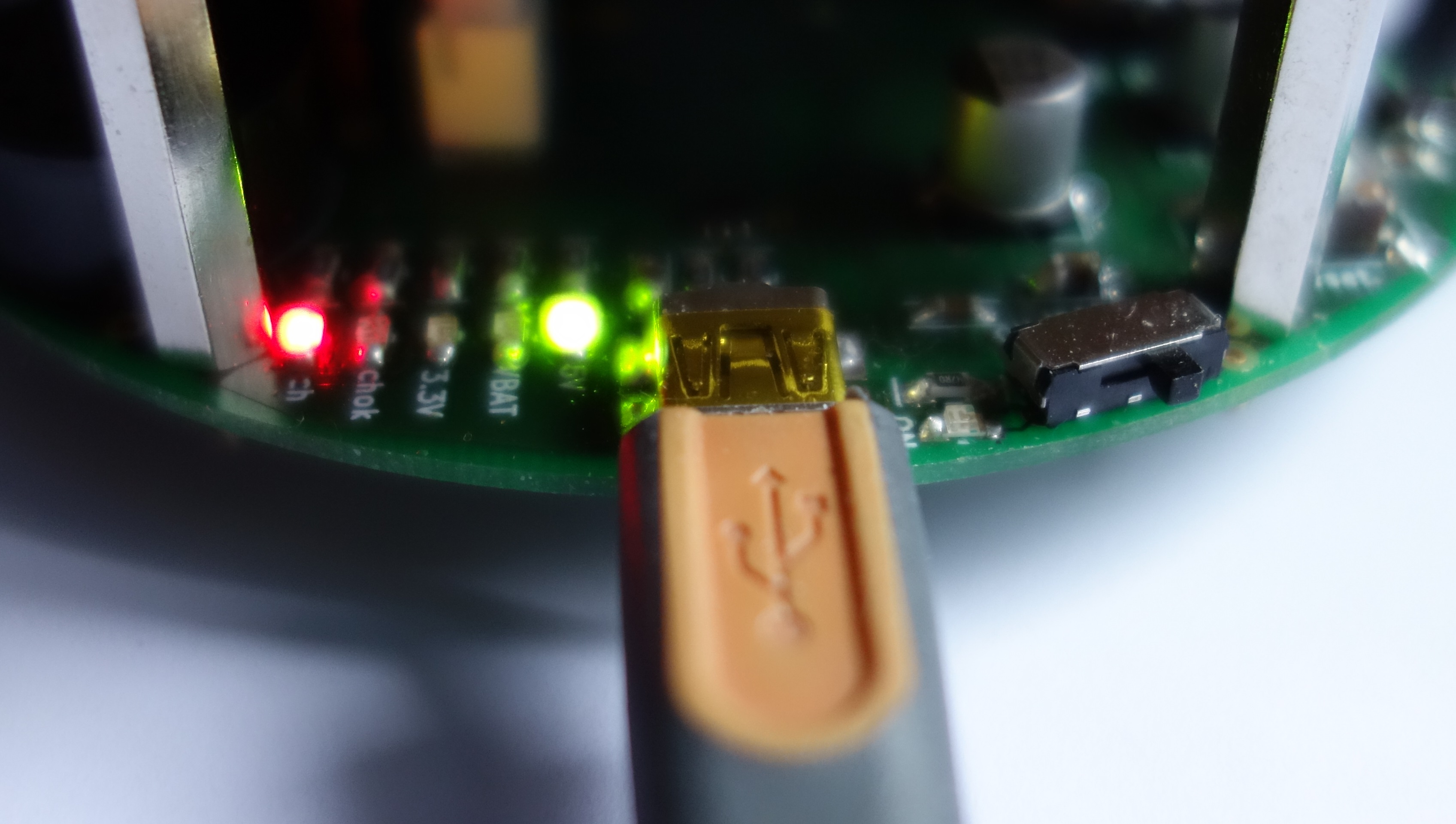
- Placez l’interrupteur sur la position OFF pour mettre le robot hors tension.
- Branchez le câble mini-USB
- La led rouge ‘CH’ et la led ‘+5V’ doivent être allumées. Elles indiquent que la batterie est en cours de rechargement.
- Lorsque la led bleu ‘CHOK’ sera allumée, ceci indiquera que votre batterie est rechargée.
3.Mise en marche du robot MRduino Wireless
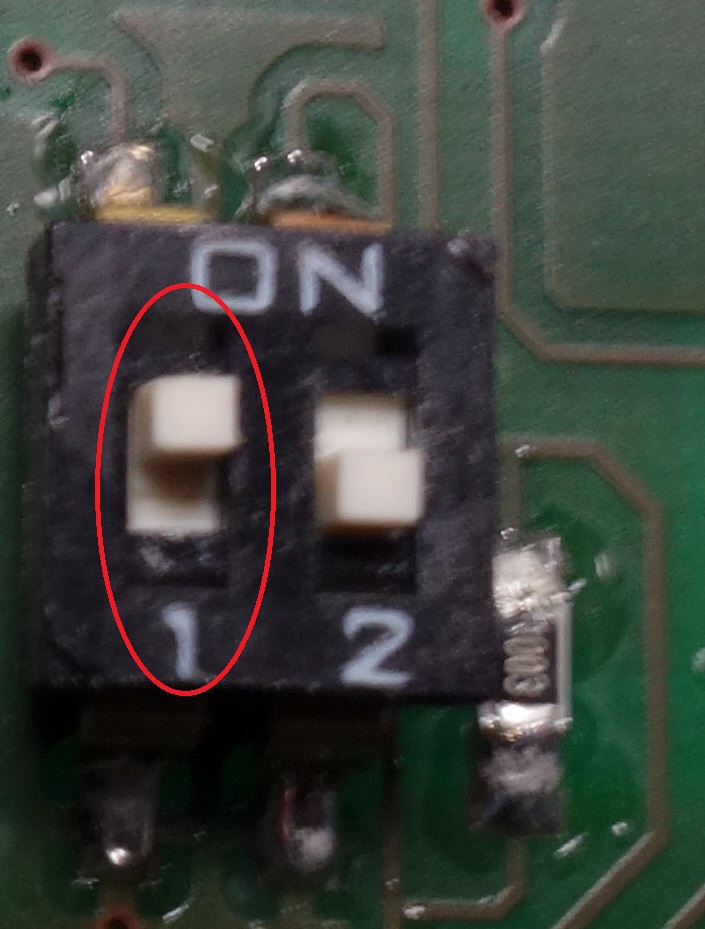
- Activez l’interrupteur ON/OFF sur la position ON.
- La led ON doit clignoter pour indiquer l’activité du robot. Si cette led ne clignote pas, alors vérifiez que le switch 1 est en position haute.
4.Téléchargement de la librairie
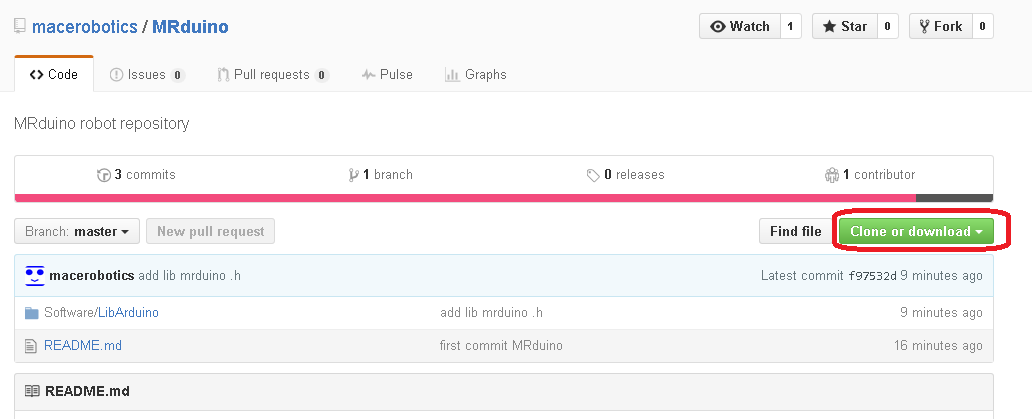
Télécharger un dossier zip du répertoire du Github, à cette adresse :
https://github.com/macerobotics/MRduino
- Cliquez sur le bouton à droite ‘Clone or Download’ :
Choisissez ‘Dowload ZIP” :
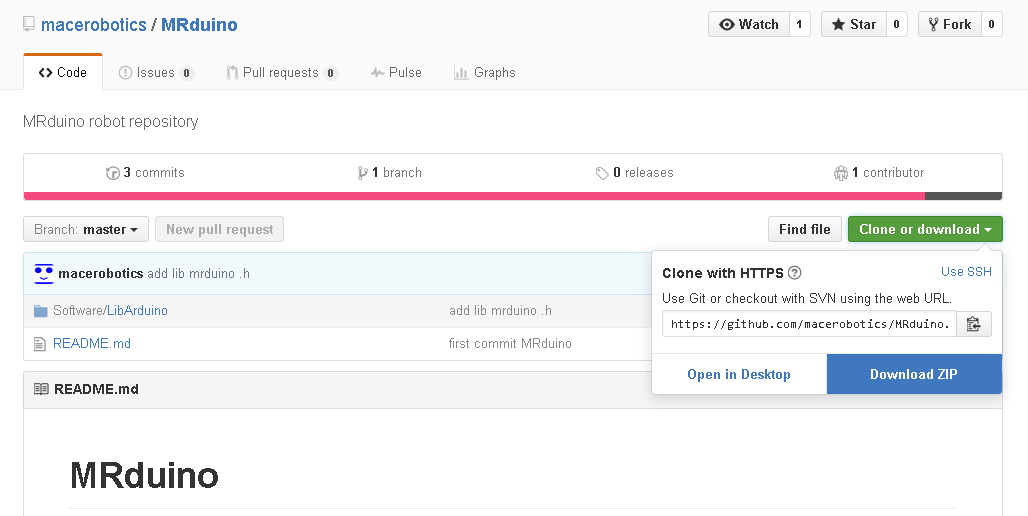
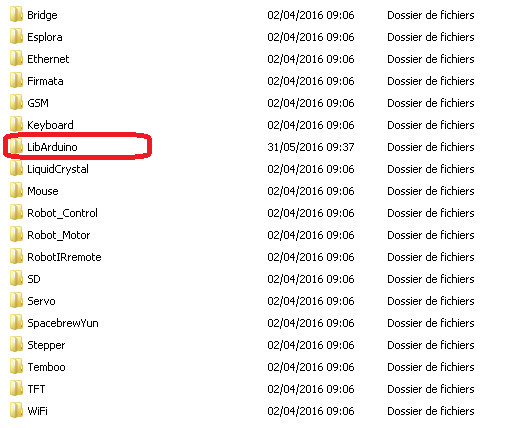
Dossier télécharger :
![]()
- Décompressez le dossier, puis copiez le dossier LibArduino dans le dossier libraries de l’IDE Arduino.
- GNU/Linux dans le répertoire : /usr/share/arduino/libraries/
- Windows 32 bits dans le répertoire : C :\Program Files\Arduino\libraries
- Windows 64 bits dans le répertoire : C :\Program Files (x86)\Arduino\libraries
5.Programmer le robot MRduino Wireless
Je considérè que vous avez installer l’IDE Arduino. Voici un lancement sous Windows :
Double-cliquez sur le logo de l’IDE Arduino :
![]()
L’IDE doit se charger :
Configuration de l’IDE Arduino
La première étape est la configuration de l’IDE Arduino pour la prise en compte du microcontrôleur ESP8266.
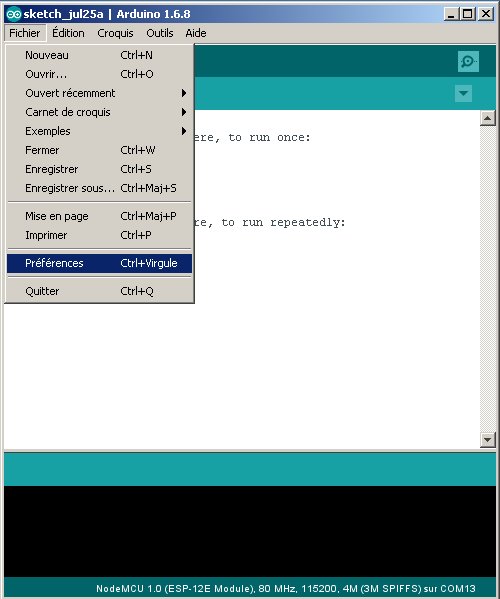
- Ouvrir l’IDE Arduino.
- Ensuite :
- Fichier->Préférences
- Dans la boite de dialogue des préférences, au champ intitulé « URL de gestionnaire de cartes supplémentaires« , vous pouvez coller l’adresse suivante :
http://arduino.esp8266.com/stable/package_esp8266com_index.json
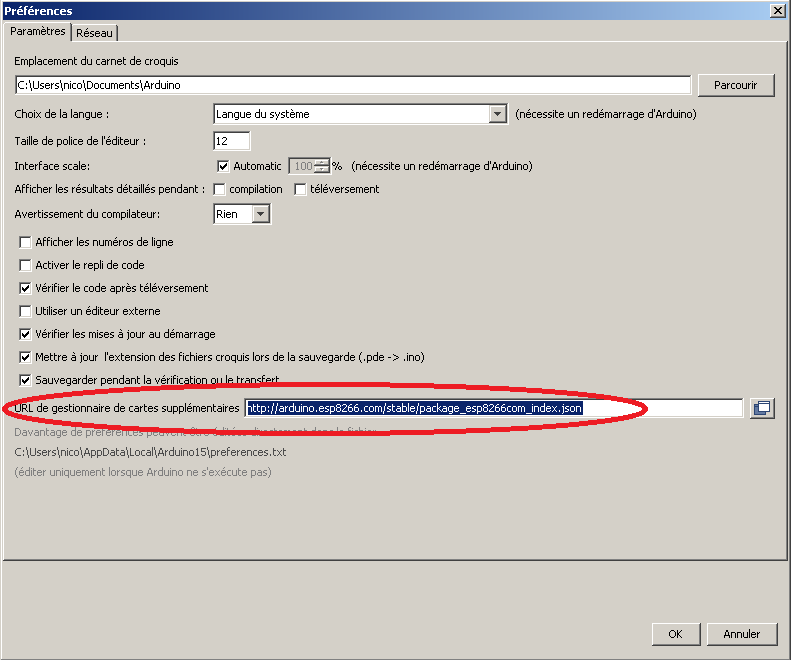
- Validez cette modification avec le bouton OK.
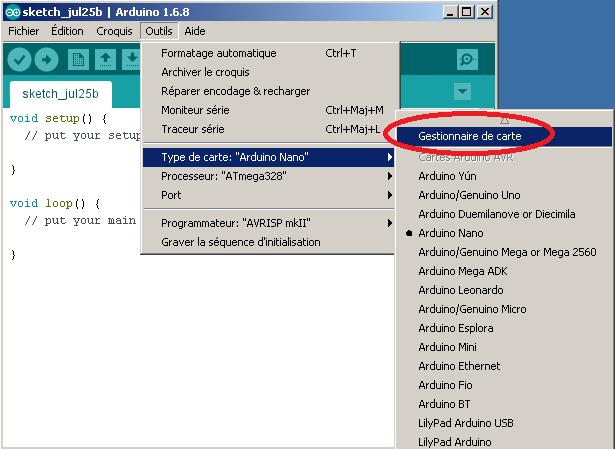
- Puis, dans le menu : Outils->Type de carte->Gestionnaire de cartes :
- Ensuite, dans le champs de recherche, recherchez « esp8266 » :

- Installez « esp8266 by ESP8266 Community » :
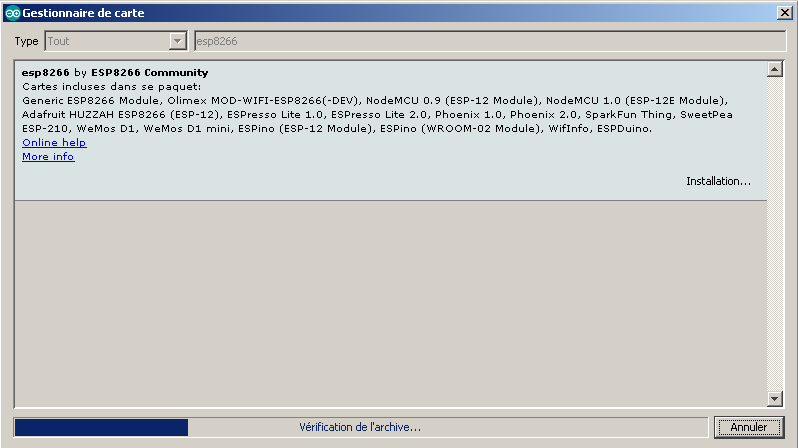 Installation en cours
Installation en cours
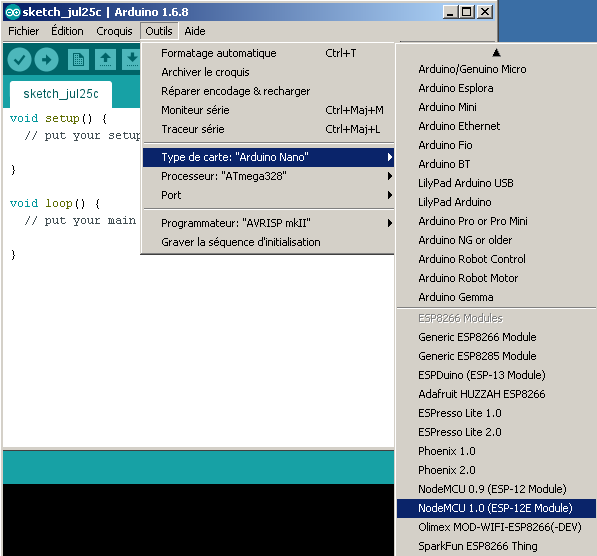
Après quelques minutes d’installation, vous pouvez sélectionner la nouvelle carte :
- Outils->Type de carte
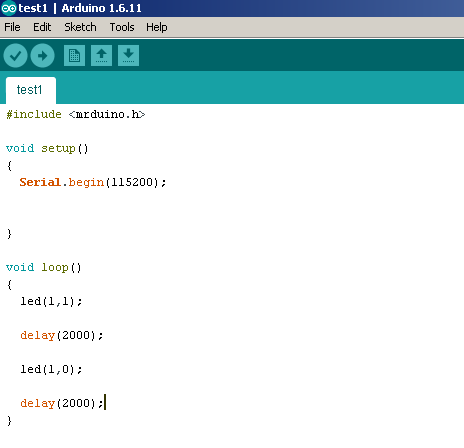
Un petit exemple pour faire clignoter une led sur le robot MRduino Wireless :
- Vérifier & télécharger le programme après avoir sélectionner le bon port.
- Attention, pour programmer le robot, il doit être éteint. Le bouton de la carte du bas doit être en position Off.
- Une fois le robot programmé, vous pouvez allumé le robot.
Exemple pour faire avancer le robot
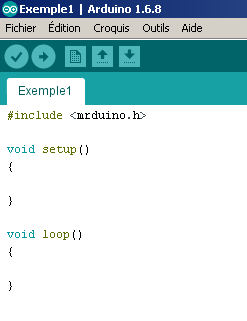
- Importez la librairie :
#include <mrduino.h>
Exemple pour faire avancer le robot MRduino :
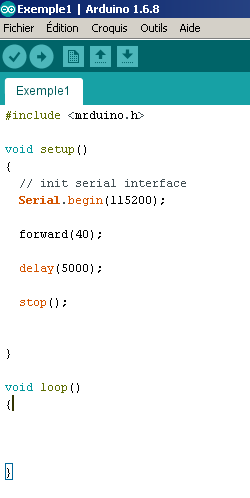
- Initialisation de la liaison série :
Serial.begin(115200);
- Avancer le robot :
forward(40);
- Un délai de 5 secondes :
delay(5000);
- Arrêt du robot :
stop();
Une fois que vous avez éditer ce petit programme, vous pouvez le compiler.
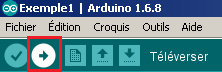
- Cliquez sur le bouton ‘Vérifier’ :
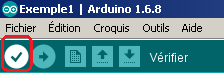
Le programme Vérifier, vous pouvez relier la carte Esus à votre PC via un câble micro-usb. Le robot doit être éteint, le bouton de la carte du bas (près de la led ON) doit être en positon off.
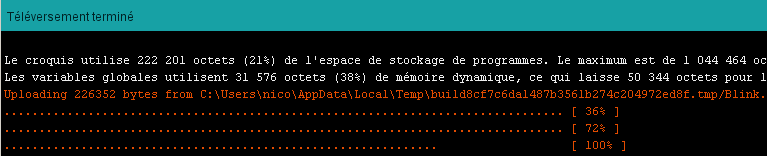
- Cliquez sur le bouton ‘Téléverser’ :
Une fois le programme Téléverser, vous pouvez :
- Débrancher le câble usb de la carte uno,
- Allumer le robot avec le bouton ON/OFF,
- Appuyez sur le bouton Reset de la carte Esus,
- Le robot MRduino Wireless doit avancer pendant 5 secondes.
Fin du tutoriel !